Ball (足球类)
- class Ball(data_list)
基类:
Sprite球的功能与属性。 使用 opt.BALL 调用实例。
- r
朝向的弧度信息,东方向为 0 度,南方向是 -π/2,西方向是 π,北方向为 π/2
- Type
Radian
- vr
角速度,弧度/秒
- Type
Radian
Attributes Summary
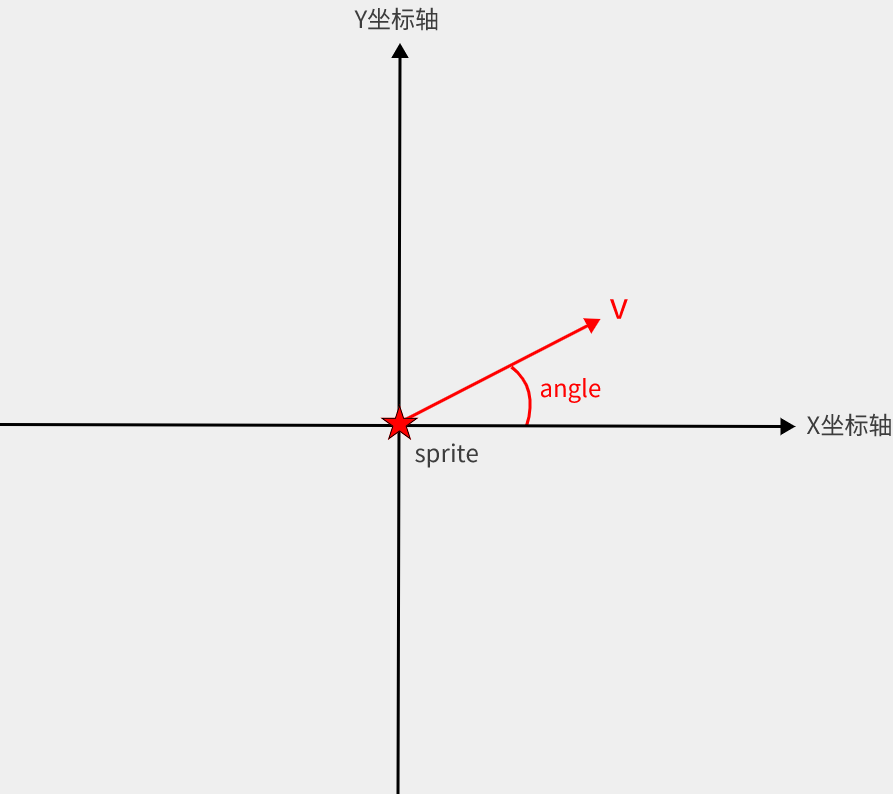
足球朝向角度,东方向为 0 度,南方向是 -90 度,西方向是 180 度,北方向为 90 度
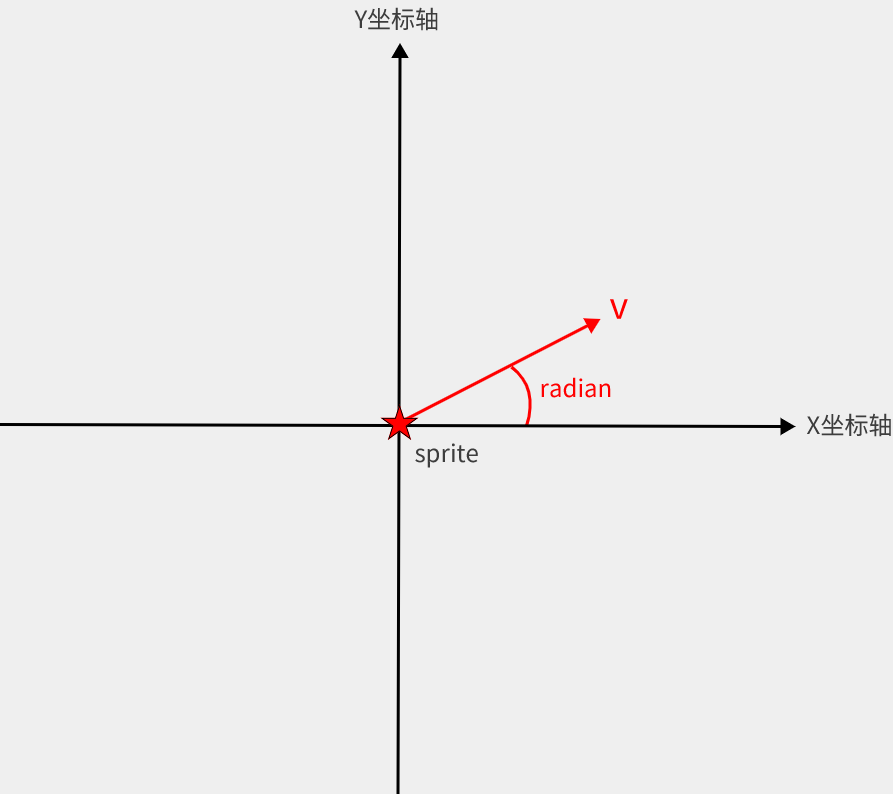
足球朝向弧度,东方向为 0 度,南方向是 -π/2,西方向是 π,北方向为 π/2
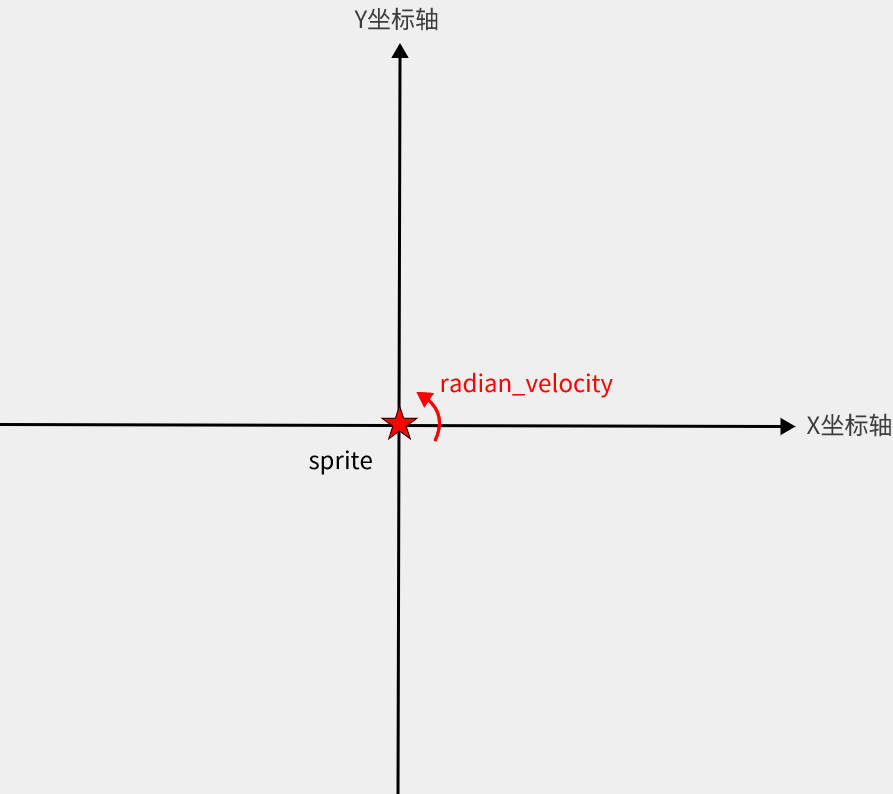
足球角速度,单位为弧度/秒
球的半径
Methods Summary
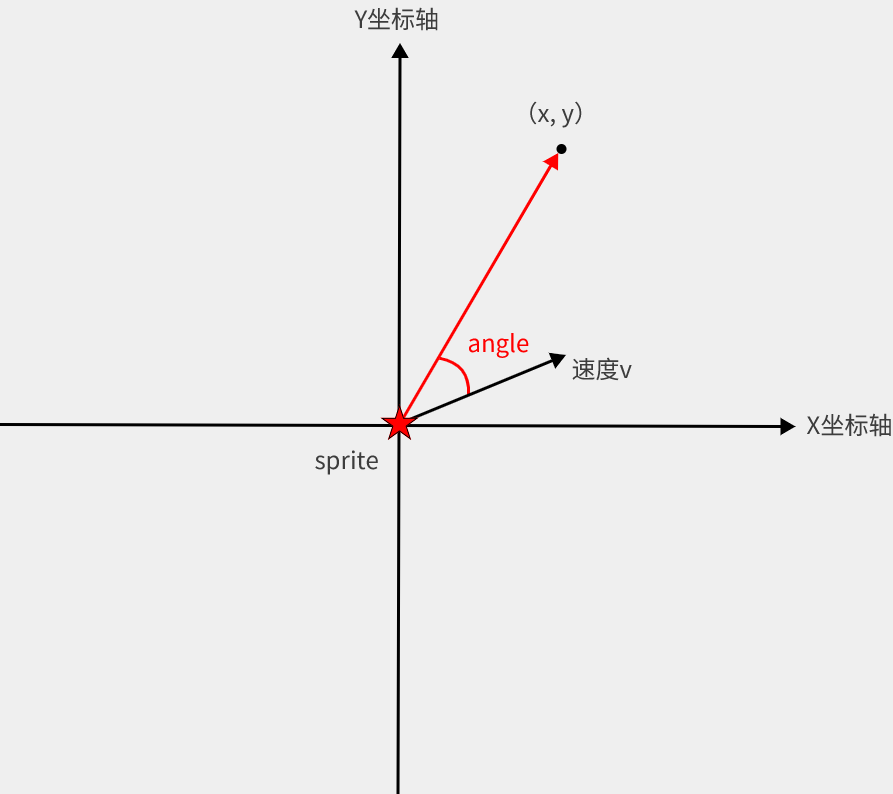
angle_to(x, y)获取足球与某坐标 (x, y) 的角度
distance_to(x, y)获取足球与某坐标 (x, y) 距离
is_tank_in_range(tank, r)判断机器人是否在自己的 range 内
on_east_of(tank[, offset])判断是否在选定机器人的东边
on_north_of(tank[, offset])判断是否在选定机器人的北
on_south_of(tank[, offset])判断是否在选定机器人的南边
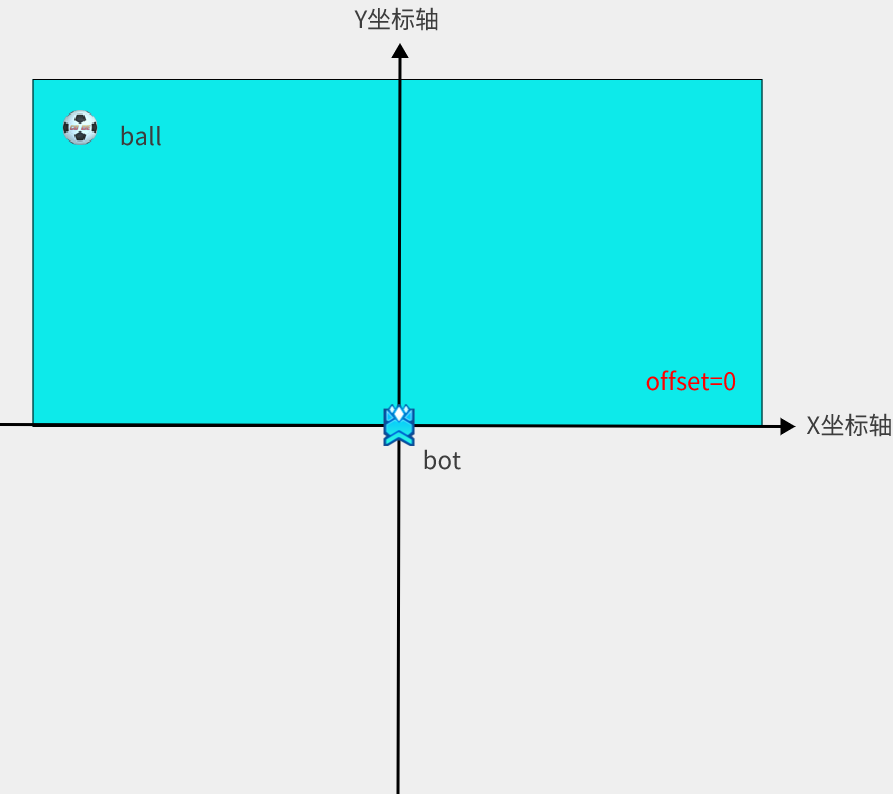
on_west_of(tank[, offset])判断是否在选定机器人的西边
radian_to(x, y)获取足球与某坐标 (x, y) 的弧度
Attributes Documentation
- angle
足球朝向角度,东方向为 0 度,南方向是 -90 度,西方向是 180 度,北方向为 90 度
- 返回
角度
- 返回类型
Angle
实际案例
>>> import opt >>> opt.BALL.r = 1.5707963267948966 >>> print(opt.BALL.angle) 90.0
- radian
足球朝向弧度,东方向为 0 度,南方向是 -π/2,西方向是 π,北方向为 π/2
- 返回
弧度
- 返回类型
Radian
实际案例
>>> import opt >>> opt.BALL.r = 1.5707963267948966 >>> print(opt.BALL.radian) 1.5707963267948966
- radian_velocity
足球角速度,单位为弧度/秒
- 返回
角速度
- 返回类型
Radian
实际案例
>>> import opt >>> opt.BALL.vr = 1.5 >>> print(opt.BALL.radian_velocity) 1.5
Methods Documentation
- angle_to(x, y)
获取足球与某坐标 (x, y) 的角度
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y, opt.BALL.r = 0, 0, 0 >>> print(opt.BALL.angle_to(-1, 0)) 180.0
- distance_to(x, y)
获取足球与某坐标 (x, y) 距离
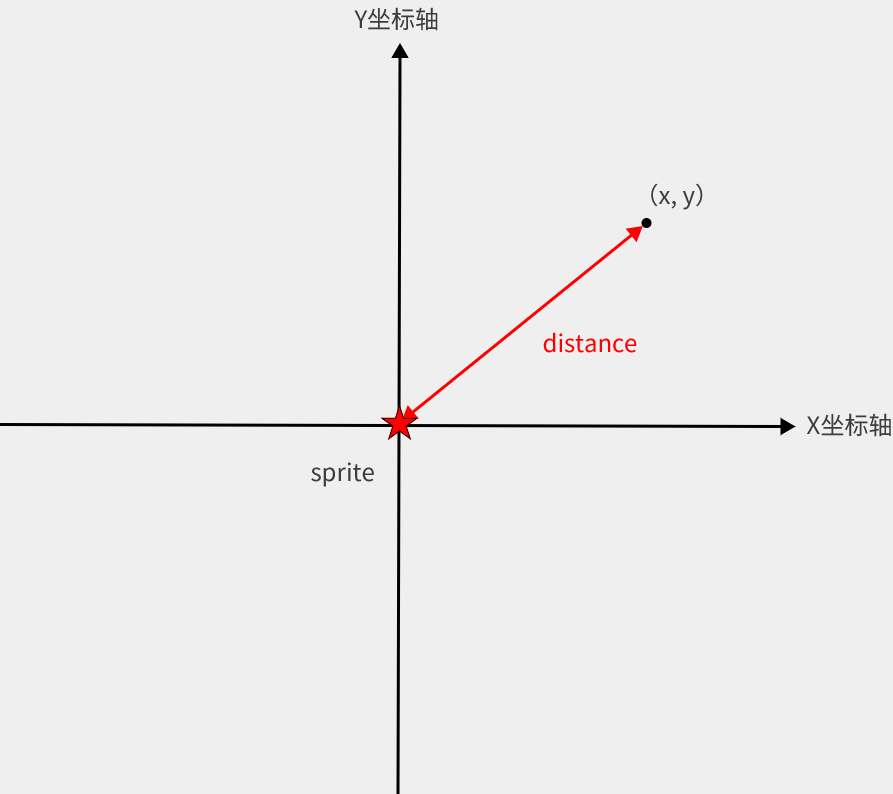
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> print(opt.BALL.distance_to(2, 0)) 2.0
- is_tank_in_range(tank, r)
判断机器人是否在自己的 range 内
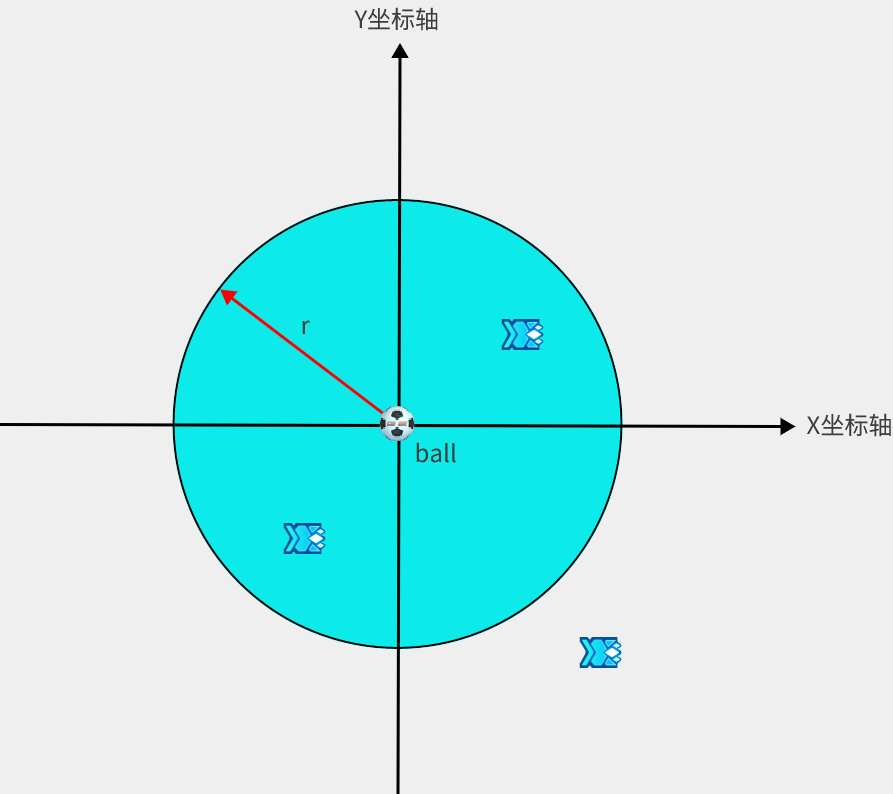
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> opt.TANK.x, opt.TANK.y = 1, 1 >>> print(opt.BALL.is_tank_in_range(opt.TANK, 2)) True
>>> print(opt.BALL.is_tank_in_range(opt.TANK, 1)) False
- on_east_of(tank, offset=0)
判断是否在选定机器人的东边
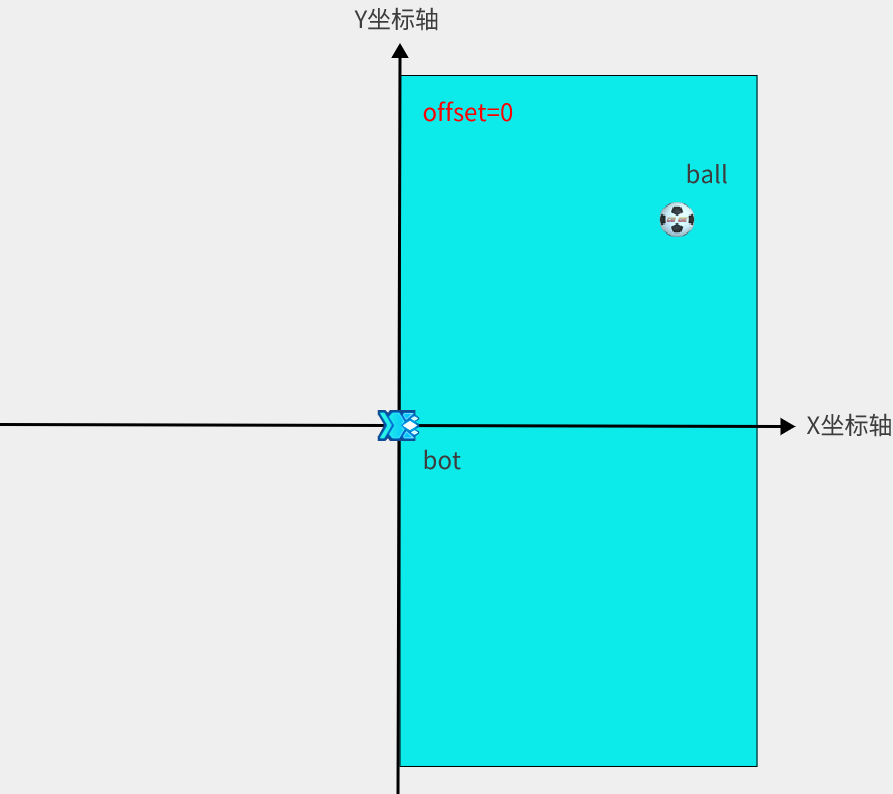
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> opt.TANK.x, opt.TANK.y = 1, 0 >>> print(opt.BALL.on_east_of(opt.TANK)) False
- on_north_of(tank, offset=0)
判断是否在选定机器人的北
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> opt.TANK.x, opt.TANK.y = 1, 0 >>> print(opt.BALL.on_north_of(opt.TANK)) False
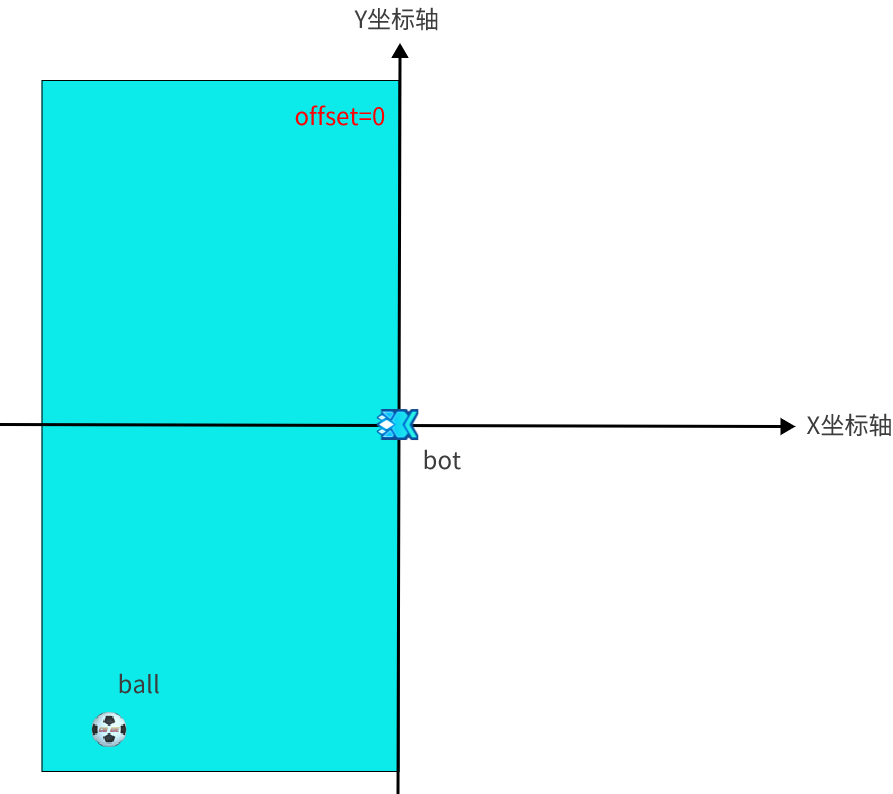
- on_south_of(tank, offset=0)
判断是否在选定机器人的南边
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> opt.TANK.x, opt.TANK.y = 1, 1 >>> print(opt.BALL.on_south_of(opt.TANK)) True
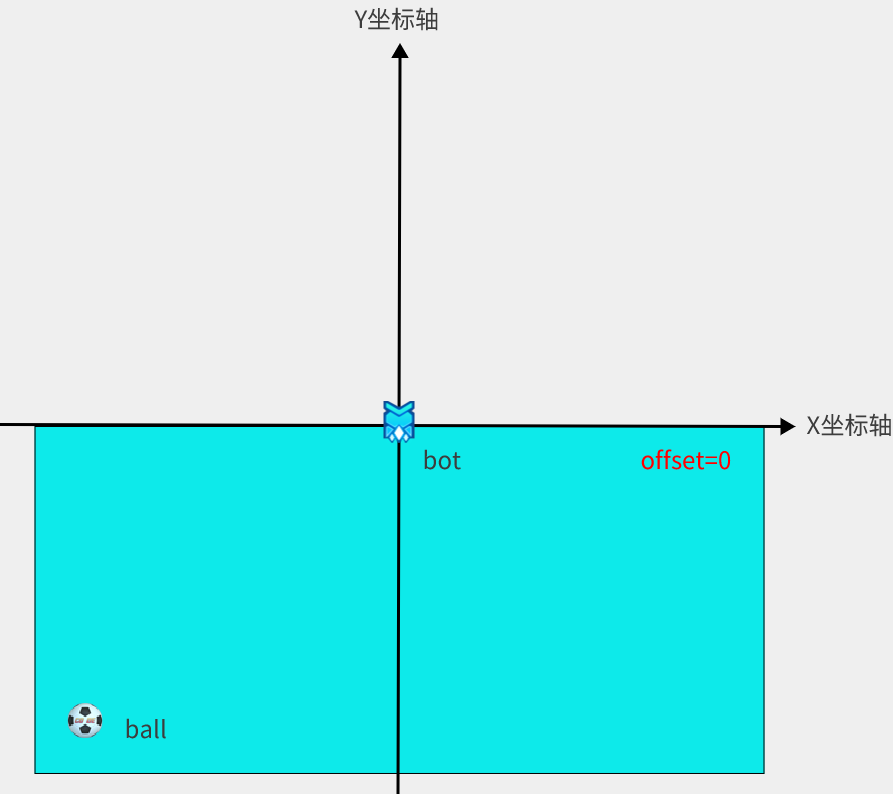
- on_west_of(tank, offset=0)
判断是否在选定机器人的西边
实际案例
>>> import opt >>> opt.BALL.x, opt.BALL.y = 0, 0 >>> opt.TANK.x, opt.TANK.y = 1, 0 >>> print(opt.BALL.on_west_of(opt.TANK)) True
>>> print(opt.BALL.on_west_of(opt.TANK, 2)) False